{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 abszy 的问题《【资料分享】基于NRF24L01无线图像传输智能侦察车》','https://www.xiaopingtou.cn/q-173657.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
本帖最后由 abszy 于 2014-9-5 16:23 编辑
作者:洛阳理工学院 张亚威 杨威 张炜冬
指导教师:舒云星 李传锋 作品简介 开发背景及意义:
图像传输已广泛应用于各个领域,与传统的有线传输相比,图像无线传输无需布线,在安装,监控节点增加和节点的移动等方面都比较方便。本作品着重于图像无线传输系统的搭建和数据传输方案以及图像识别技术的设计,并用小车搭载图像采集、无线发送设备。
作品采用重力感应控制,在小车前进的同时使用超声波和光电开关来实现小车的壁障和防止掉入悬崖,保证了图像采集、发送设备的安全。基于嵌入式开发板(以Freescale MK10DN512ZVLL10芯片为控制核心)处理器的低成本图像无线传输系统。
产品集图像的采集、无线传输显示以及图像识别为一体,且小车同样采用无线控制。这样能采集所监控现场的图像信息,通过无线射频模块将图像发送到接收端的同时,方便做出判断,能控制搭载着视频采集装置的小车,寻找需要的目标后使用无线的形式发回来,并在彩屏上显示采集到的图像。
功能和使用说明:
作品是基于嵌入式开发板(以Freescale MK10DN512ZVLL10芯片为控制核心)处理器的低成本图像无线传输系统,通过NRF24L01无线模块通信,利用遥控器的彩屏显示部分以及重力感应来控制小车的运行与侦查,通过车载摄像头来拍摄小车周围的图像可以进行研究。
在恶劣狭小等人体不宜进去以及火灾、排雷等存在危险的地方,产品能行动自如,代替人执行任务。同时图像的压缩和解压缩技术的使用,提高了图像的传输效率。
后期还将采用RFID和Wife双重无线传输设计,以及图像识别技术,将采集到的图像进行识别,在触摸屏上自动标示目标物体,同时搭载机械手臂对目标进行处理。 结构说明:
本系统的设计分两大部分:
一、手柄显示部分:
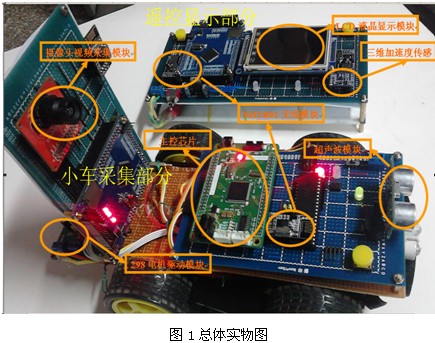
手柄显示部分包括重力遥控和LCD液晶显示,其中集成了以SSD1298驱动控制器的LCD作为显示模块,nRF24L01无线作为通信模块,重力感应作为控制模块,着重对无线通信模块进行设计,图像数据传输模式为无线方式。重力感应系统控制小车的前进,按键控制重力感应系统是否开启,这样就能避免在重力感应的影响。 二、小车视频采集部分:
小车视频采集部分由摄像头、超声波、光电开关、电机驱动、小车组成,超声波控制小车的防碰撞、光电开关控制小车的防掉入悬崖之中,摄像头采集小车周围的信息,直流电机则驱动小车前进,这些都是建立在nRF24L01无线通信模块上。实物总体图如图1所示:
平台选型说明 作品是基于以Freescale MK10DN512ZVLL10芯片为控制核心,相比采用51单片机控制实时性能更好。MK10DN512是 “飞思卡尔” 公司生产的kinetis系列微控制器,该芯片包含512KB的flash存储器以及128KB的运行内存,共100个引脚,采用LQFP封装。拥有丰富的模拟,通信等外设。核心板实物图如图2所示:

设计说明 一、 设计方案实现
1.1总体设计
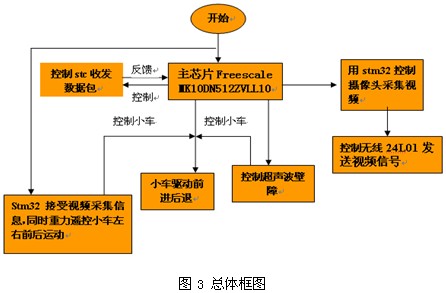
本作品设计的总体框图如图3所示。
二、小车部分
2.1动力驱动设计
2.1.1 直流电机介绍
电机和驱动芯片的选择,通过数据测定和分析比较,确定最佳的设计方案。直流电机容易控制,只需要正负两根线就可以使电机转动,若想使电机反向转动,只需要反接正负极即可。基于第一点优势,可以知道直流电机驱动电路非常容易设计。且直流电机可以节省单片机的输出口,为后续工作提供更多的可操作空间,更便于电路的扩展。同时也可以节约单片机内部定时器和中断资源。原理图如图5
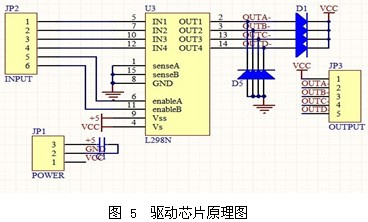
驱动板接口定义如下;
+5V:芯片电压5V。
VCC:电机电压,最大可接50V。
GND:共地接法。
A-~D-:输出端,接电机。
A~D+ :为步进电机公共端,模块上接了VCC。
EN1、EN2:高电平有效,EN1、EN2分别为 IN1和IN2、IN3和IN4的使能端。
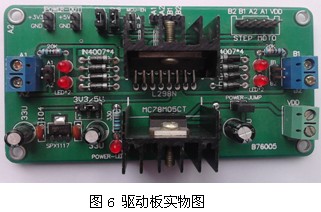
IN1~ IN4:输入端,输入端电平和输出端电平是对应的。实物图如图6
2.2超声波模块
2.2.1:超声波功能介绍
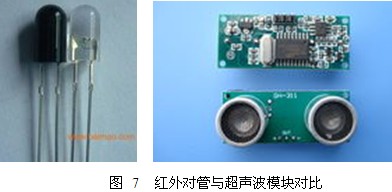
小车壁障时候,要检测前方的路况,考虑了红外对管与超声波。红外对管价格较便宜,但是测距太近,检测到障碍物,车速过快就会撞上,损坏图像采集车,得不偿失。所以采用超声波模块实现障碍物的检测,让运动中的小车能及时的减速躲开障碍物,从而保护小车以及图像采集设备的安全。采用的HC-SR04超声波模块可提供2Cm—400CM的非接触式距离感测功能,测距精度可高达3mm,模块包括超声波发射器、接收器与控制电路。实物图如图7所示: 2.2.2:接线端口
1号:接VCC电源
2号:TX信号端口
3号:RX信号端口
4、5号:GND接地线
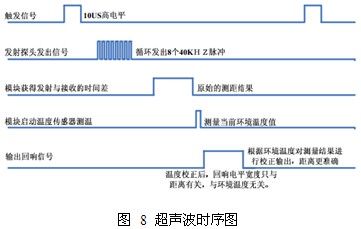
2.2.3:超声波基本工作原理:
1) 采用IO口TRIG触发测距,给最少10uS的高电平信号。
2) 模块自动发送8个40Khz的方波,自动检测是否有信号返回。
3) 有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。超声波时序图如图8
2.3摄像头模块
2.3.1:摄像头功能介绍
OV7670图像传感器采用带有AL422B高速缓存的OV7670模块,该模块内部电路已经连接好,外部预留OV7670传感器的各引脚接口,方便与外电路的连接。OV7670输出的图像数据先暂存在AL422B中,然后由STM32处理器读取,因此AL422B的数据输入是OV7670的输出,AL422B的数据输出是STM32处理器的输入,AL422B是整个系统传输的关键,它在图像采集电路中的连接设计最为重要。该模块的实物图如图9所示。

2.3.2:摄像头采集模块结构
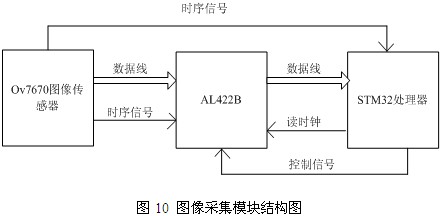
由于 OV7670输出的图像数据流频率较高,为了使得STM32处理器和传感器之间的速度匹配,在OV7670和STM32F103VET6处理器之间添加AL422B高速缓存,将输入的高速图像数据流暂存,供STM32处理器读出,从而实现完整一帧图像的采集,其总体结构如图10所示。
程序设计流程图如图11

三、手柄部分
3.1三维加速度传感器
3.1.1:加速度传感器功能介绍
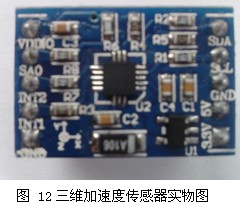
作品使用了目前最普及的重力感应技术,通过对重力的判断,控制芯片自动的识别,在方便使用的同时,还对其重力感应进行了优化,在使用的时候才打开,这样,就减少重力对小车的影响。设计是向后倾斜时候,小车就向前移动,当向前倾斜的时候就向后移动,当向左倾斜的时候就向左拐弯,当向右倾斜的时候就向右拐弯。实物图如图12所示:
3.1.2:加速度传感器介绍
MMA845是一款具有12位分辨率的智能低功耗、三轴、电容式微机械加速度传感器。这款加速度传感器具有丰富嵌入式功能,带有灵活的用户可编程选项,可以配置多达两个中断引脚。嵌入式中断功能可以节省整体功耗,解除主处理器不断轮询数据的负担。 3.1.3:传感器静止方向加速度数值
MMA845静止时的加速度数值如图13所示:

3.2 TFT触摸屏
3.2.1:触摸屏的功能介绍
彩屏支持240RGBx320点分辨率,支持262,144 {MOD}的系统单芯片包括720通道的原驱动,320通道的门驱动器,172800字节的图形数据和电源电路的RAM驱动。LCD由驱动IC SSD1298控制,SSD1298内有172800Byte的图形显示数据存储器(GDDRAM),在LCD液晶屏上显示数据时,通过LCM和处理器的接口把像素值写入SSD1298的GDDRAM中,其余工作由SSD1298完成与处理器无关。LCM和STM32处理器的连接如图14所示。

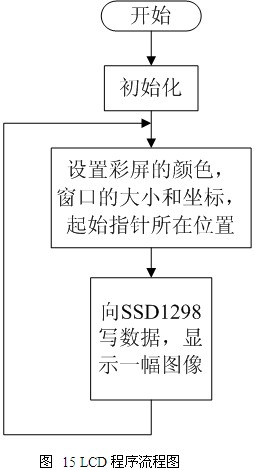
3.2.2:LCD图像显示的程序设计
要驱动LCD首先要对LCD进行配置,包括FSMC的配置,引脚配置和相应的寄存器的配置,这些配置都在初始化中完成,然后就可以对LCD进行操作,程序流程图如图15所示。
3.2.3:LCD静态图像显示
在视频显示部分选择了可以存储的触控彩屏,从而可以更好的收集周边的信息。以便实现图像数据的记录。
由于LCD液晶显示不是本系统设计的重点,LCD的实验仅作验证即可,静态图像显示的结果(显示一朵牡丹花)如图18所示。

四、无线传输信息部分
4.1 nRF24L01无线简介:
在选用无线模块时有nRF24L01无线如图18和315无线如图17,考虑到作品需要传输大量的图像信息,因为传输图像的时候容易丢包,在传输过程中有一个数据包的丢失都会导致整个图像的传输失败,因此采用的比较稳定的传输模式,无线nRF24L01则成为了首选。
在NRF24L01无线模块通信上,设计了两种无线数据传输方案,成功解决了无线传输数据丢包的问题,并对两种方案进行了论证,设计出适用于本图像无线传输系统的通信程序,最终实现了数据的百分之百发送接收,并对无线传输模块进行了接收数据的正确性和静态数据的传输速度测试。
基于以上模块,同时采用了简单的图像压缩和解压缩技术,设计并制作了图像无线传输系统的原理系统,对系统进行了整体性能测试,得出了系统整体传输速率。

作品特 {MOD} 本作品具有以下特 {MOD}:
1、小车搭载高精度超声波模块,防止撞到障碍物损坏小车以及图像采集设备,这样设计更人性化,使整个系统工作稳定。
2、采用NRF24L01无线模块实时发送摄像头采集的图像信息,实现图像的无线传输,代替传统有线图像传输,安装更方便、图像监控更容易,节省大量的人力物力。
3、采用NRF24L01无线模块控制小车,给小车实时发送控制指令,实现小车的远程控制。
4、本作品采用重力感应无线遥控小车,控制更加的灵活、方便。
5、采用3.2寸TFT超大屏幕显示图像信息,并配备SD卡存储关键的图片信息,使智能侦察车更有侦查意义。
6、小车搭载光电开关,防止小车掉入悬崖之中,给智能侦察车提供安全保障。 作品展望:
1、以后采用图像识别技术,使智能侦察车拥有目标物体的自动识别功能,是侦察工作更高效。
2、在小车上安装机械手臂,对目标物体进行相应的处理,使侦察工作更有实际的意义。
系统演示视频:http://p.bokecc.com/playvideo.bo ... id=E88B22B6FBB28303
作者:洛阳理工学院 张亚威 杨威 张炜冬
指导教师:舒云星 李传锋 作品简介 开发背景及意义:
图像传输已广泛应用于各个领域,与传统的有线传输相比,图像无线传输无需布线,在安装,监控节点增加和节点的移动等方面都比较方便。本作品着重于图像无线传输系统的搭建和数据传输方案以及图像识别技术的设计,并用小车搭载图像采集、无线发送设备。
作品采用重力感应控制,在小车前进的同时使用超声波和光电开关来实现小车的壁障和防止掉入悬崖,保证了图像采集、发送设备的安全。基于嵌入式开发板(以Freescale MK10DN512ZVLL10芯片为控制核心)处理器的低成本图像无线传输系统。
产品集图像的采集、无线传输显示以及图像识别为一体,且小车同样采用无线控制。这样能采集所监控现场的图像信息,通过无线射频模块将图像发送到接收端的同时,方便做出判断,能控制搭载着视频采集装置的小车,寻找需要的目标后使用无线的形式发回来,并在彩屏上显示采集到的图像。
功能和使用说明:
作品是基于嵌入式开发板(以Freescale MK10DN512ZVLL10芯片为控制核心)处理器的低成本图像无线传输系统,通过NRF24L01无线模块通信,利用遥控器的彩屏显示部分以及重力感应来控制小车的运行与侦查,通过车载摄像头来拍摄小车周围的图像可以进行研究。
在恶劣狭小等人体不宜进去以及火灾、排雷等存在危险的地方,产品能行动自如,代替人执行任务。同时图像的压缩和解压缩技术的使用,提高了图像的传输效率。
后期还将采用RFID和Wife双重无线传输设计,以及图像识别技术,将采集到的图像进行识别,在触摸屏上自动标示目标物体,同时搭载机械手臂对目标进行处理。 结构说明:
本系统的设计分两大部分:
一、手柄显示部分:
手柄显示部分包括重力遥控和LCD液晶显示,其中集成了以SSD1298驱动控制器的LCD作为显示模块,nRF24L01无线作为通信模块,重力感应作为控制模块,着重对无线通信模块进行设计,图像数据传输模式为无线方式。重力感应系统控制小车的前进,按键控制重力感应系统是否开启,这样就能避免在重力感应的影响。 二、小车视频采集部分:
小车视频采集部分由摄像头、超声波、光电开关、电机驱动、小车组成,超声波控制小车的防碰撞、光电开关控制小车的防掉入悬崖之中,摄像头采集小车周围的信息,直流电机则驱动小车前进,这些都是建立在nRF24L01无线通信模块上。实物总体图如图1所示:
平台选型说明 作品是基于以Freescale MK10DN512ZVLL10芯片为控制核心,相比采用51单片机控制实时性能更好。MK10DN512是 “飞思卡尔” 公司生产的kinetis系列微控制器,该芯片包含512KB的flash存储器以及128KB的运行内存,共100个引脚,采用LQFP封装。拥有丰富的模拟,通信等外设。核心板实物图如图2所示:
设计说明 一、 设计方案实现
1.1总体设计
本作品设计的总体框图如图3所示。
二、小车部分
2.1动力驱动设计
2.1.1 直流电机介绍
电机和驱动芯片的选择,通过数据测定和分析比较,确定最佳的设计方案。直流电机容易控制,只需要正负两根线就可以使电机转动,若想使电机反向转动,只需要反接正负极即可。基于第一点优势,可以知道直流电机驱动电路非常容易设计。且直流电机可以节省单片机的输出口,为后续工作提供更多的可操作空间,更便于电路的扩展。同时也可以节约单片机内部定时器和中断资源。原理图如图5
驱动板接口定义如下;
+5V:芯片电压5V。
VCC:电机电压,最大可接50V。
GND:共地接法。
A-~D-:输出端,接电机。
A~D+ :为步进电机公共端,模块上接了VCC。
EN1、EN2:高电平有效,EN1、EN2分别为 IN1和IN2、IN3和IN4的使能端。
IN1~ IN4:输入端,输入端电平和输出端电平是对应的。实物图如图6
2.2超声波模块
2.2.1:超声波功能介绍
小车壁障时候,要检测前方的路况,考虑了红外对管与超声波。红外对管价格较便宜,但是测距太近,检测到障碍物,车速过快就会撞上,损坏图像采集车,得不偿失。所以采用超声波模块实现障碍物的检测,让运动中的小车能及时的减速躲开障碍物,从而保护小车以及图像采集设备的安全。采用的HC-SR04超声波模块可提供2Cm—400CM的非接触式距离感测功能,测距精度可高达3mm,模块包括超声波发射器、接收器与控制电路。实物图如图7所示: 2.2.2:接线端口
1号:接VCC电源
2号:TX信号端口
3号:RX信号端口
4、5号:GND接地线
2.2.3:超声波基本工作原理:
1) 采用IO口TRIG触发测距,给最少10uS的高电平信号。
2) 模块自动发送8个40Khz的方波,自动检测是否有信号返回。
3) 有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。超声波时序图如图8
2.3摄像头模块
2.3.1:摄像头功能介绍
OV7670图像传感器采用带有AL422B高速缓存的OV7670模块,该模块内部电路已经连接好,外部预留OV7670传感器的各引脚接口,方便与外电路的连接。OV7670输出的图像数据先暂存在AL422B中,然后由STM32处理器读取,因此AL422B的数据输入是OV7670的输出,AL422B的数据输出是STM32处理器的输入,AL422B是整个系统传输的关键,它在图像采集电路中的连接设计最为重要。该模块的实物图如图9所示。
2.3.2:摄像头采集模块结构
由于 OV7670输出的图像数据流频率较高,为了使得STM32处理器和传感器之间的速度匹配,在OV7670和STM32F103VET6处理器之间添加AL422B高速缓存,将输入的高速图像数据流暂存,供STM32处理器读出,从而实现完整一帧图像的采集,其总体结构如图10所示。
程序设计流程图如图11
三、手柄部分
3.1三维加速度传感器
3.1.1:加速度传感器功能介绍
作品使用了目前最普及的重力感应技术,通过对重力的判断,控制芯片自动的识别,在方便使用的同时,还对其重力感应进行了优化,在使用的时候才打开,这样,就减少重力对小车的影响。设计是向后倾斜时候,小车就向前移动,当向前倾斜的时候就向后移动,当向左倾斜的时候就向左拐弯,当向右倾斜的时候就向右拐弯。实物图如图12所示:
3.1.2:加速度传感器介绍
MMA845是一款具有12位分辨率的智能低功耗、三轴、电容式微机械加速度传感器。这款加速度传感器具有丰富嵌入式功能,带有灵活的用户可编程选项,可以配置多达两个中断引脚。嵌入式中断功能可以节省整体功耗,解除主处理器不断轮询数据的负担。 3.1.3:传感器静止方向加速度数值
MMA845静止时的加速度数值如图13所示:
3.2 TFT触摸屏
3.2.1:触摸屏的功能介绍
彩屏支持240RGBx320点分辨率,支持262,144 {MOD}的系统单芯片包括720通道的原驱动,320通道的门驱动器,172800字节的图形数据和电源电路的RAM驱动。LCD由驱动IC SSD1298控制,SSD1298内有172800Byte的图形显示数据存储器(GDDRAM),在LCD液晶屏上显示数据时,通过LCM和处理器的接口把像素值写入SSD1298的GDDRAM中,其余工作由SSD1298完成与处理器无关。LCM和STM32处理器的连接如图14所示。
3.2.2:LCD图像显示的程序设计
要驱动LCD首先要对LCD进行配置,包括FSMC的配置,引脚配置和相应的寄存器的配置,这些配置都在初始化中完成,然后就可以对LCD进行操作,程序流程图如图15所示。
3.2.3:LCD静态图像显示
在视频显示部分选择了可以存储的触控彩屏,从而可以更好的收集周边的信息。以便实现图像数据的记录。
由于LCD液晶显示不是本系统设计的重点,LCD的实验仅作验证即可,静态图像显示的结果(显示一朵牡丹花)如图18所示。
四、无线传输信息部分
4.1 nRF24L01无线简介:
在选用无线模块时有nRF24L01无线如图18和315无线如图17,考虑到作品需要传输大量的图像信息,因为传输图像的时候容易丢包,在传输过程中有一个数据包的丢失都会导致整个图像的传输失败,因此采用的比较稳定的传输模式,无线nRF24L01则成为了首选。
在NRF24L01无线模块通信上,设计了两种无线数据传输方案,成功解决了无线传输数据丢包的问题,并对两种方案进行了论证,设计出适用于本图像无线传输系统的通信程序,最终实现了数据的百分之百发送接收,并对无线传输模块进行了接收数据的正确性和静态数据的传输速度测试。
基于以上模块,同时采用了简单的图像压缩和解压缩技术,设计并制作了图像无线传输系统的原理系统,对系统进行了整体性能测试,得出了系统整体传输速率。
作品特 {MOD} 本作品具有以下特 {MOD}:
1、小车搭载高精度超声波模块,防止撞到障碍物损坏小车以及图像采集设备,这样设计更人性化,使整个系统工作稳定。
2、采用NRF24L01无线模块实时发送摄像头采集的图像信息,实现图像的无线传输,代替传统有线图像传输,安装更方便、图像监控更容易,节省大量的人力物力。
3、采用NRF24L01无线模块控制小车,给小车实时发送控制指令,实现小车的远程控制。
4、本作品采用重力感应无线遥控小车,控制更加的灵活、方便。
5、采用3.2寸TFT超大屏幕显示图像信息,并配备SD卡存储关键的图片信息,使智能侦察车更有侦查意义。
6、小车搭载光电开关,防止小车掉入悬崖之中,给智能侦察车提供安全保障。 作品展望:
1、以后采用图像识别技术,使智能侦察车拥有目标物体的自动识别功能,是侦察工作更高效。
2、在小车上安装机械手臂,对目标物体进行相应的处理,使侦察工作更有实际的意义。
系统演示视频:http://p.bokecc.com/playvideo.bo ... id=E88B22B6FBB28303
友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
一周热门 更多>